Dreht Ihr Motor schon mehr oder wenig schnell in eine Richtung sobald Sie die Software verbinden? Klicken Sie auf Moduls- Motion Kit- Manuel PID Configuration - Zero Offset
Setzen Sie den Zerio Offset Wert auf Null.
0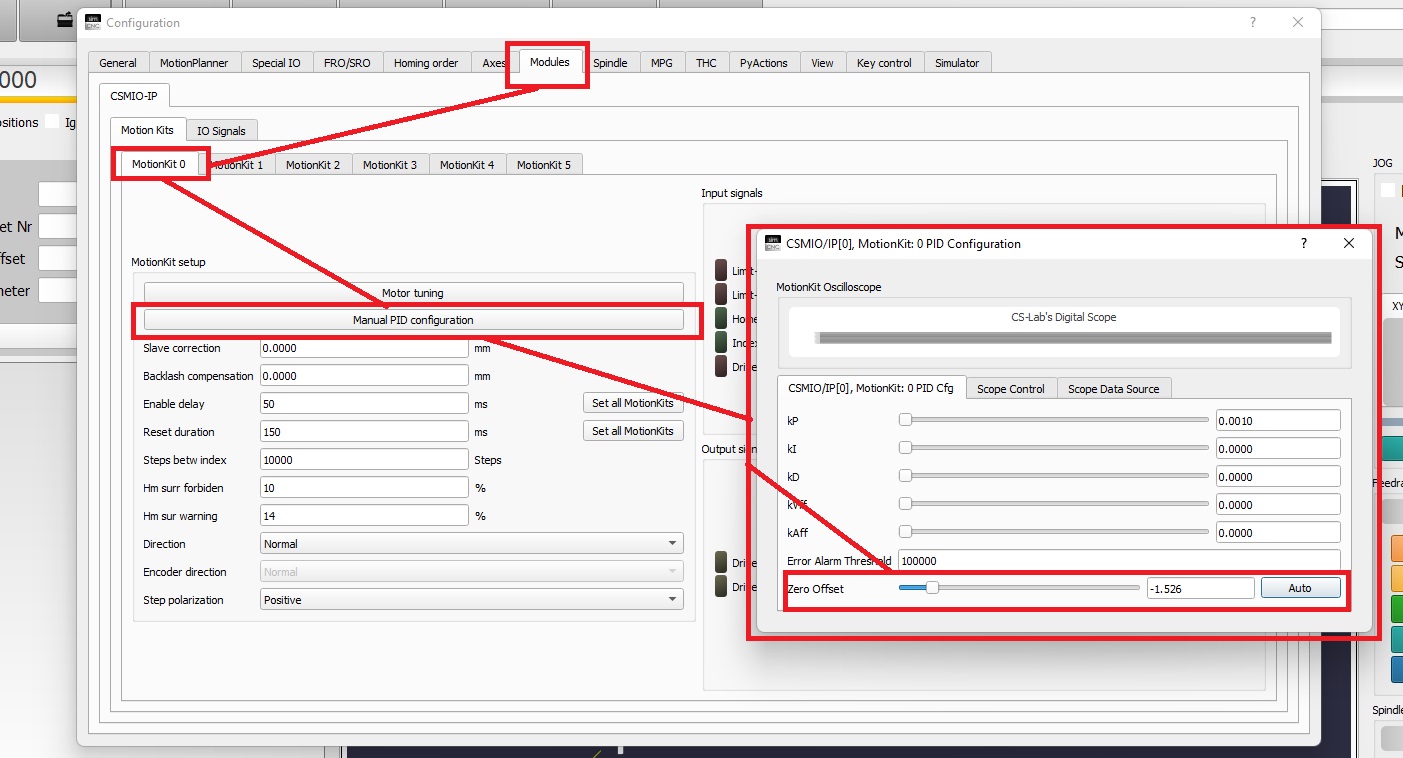
TIP: Vergrößeren Sie unter Error Alarm, Wert entsprechend, damit nicht so schnell der Alarm kommt. Später können Sie nach erfolgreichen Autotuning den Wert wieder reduzieren.
Dreht Ihr Motor schon mehr oder wenig schnell in eine Richtung sobald Sie die Software verbinden? Klicken Sie auf Moduls- Motion Kit- Manuel PID Configuration - Zero Offset Setzen Sie den Zerio...
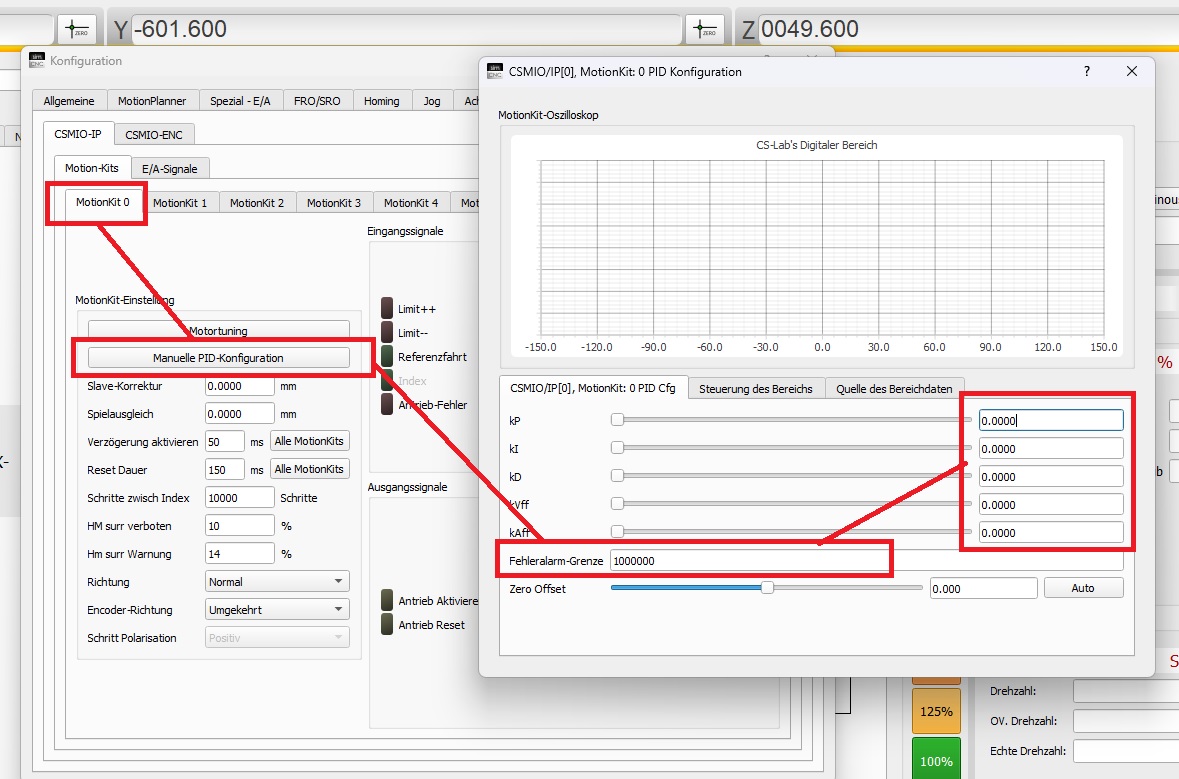
mehr erfahren » Fenster schließen Dreht Ihr Motor schon mehr oder wenig schnell in eine Richtung sobald Sie die Software verbinden? Klicken Sie auf Moduls- Motion Kit- Manuel PID Configuration - Zero Offset
Setzen Sie den Zerio Offset Wert auf Null.
0
TIP: Vergrößeren Sie unter Error Alarm, Wert entsprechend, damit nicht so schnell der Alarm kommt. Später können Sie nach erfolgreichen Autotuning den Wert wieder reduzieren.