






Meldungen der SIM Software
Hier finden Sie Meldungen und der Fehlerbeschreibung.
Sie werden unterschiedliche Meldungsfenster sehen- einmal aus Windows und einmal aus einem MAC System.
Grundsätzlich kann man keine 100% Anleitung schreiben. Sie müssen sich schon einen Moment Zeit nehmen und sich mit der Software auseinander setzen.
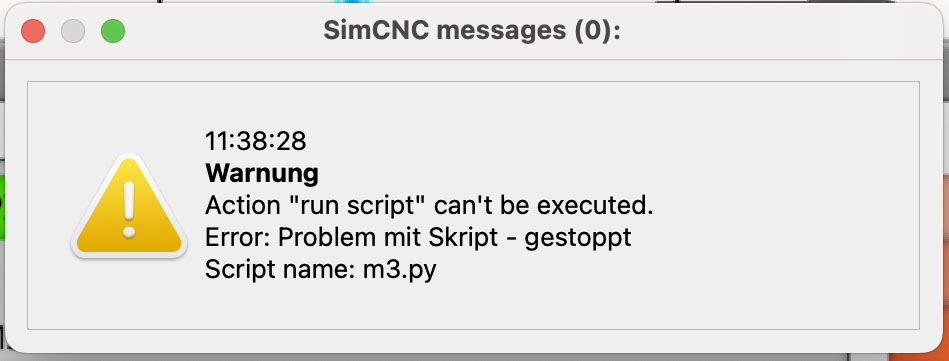
M4 wird nicht unterstützt.
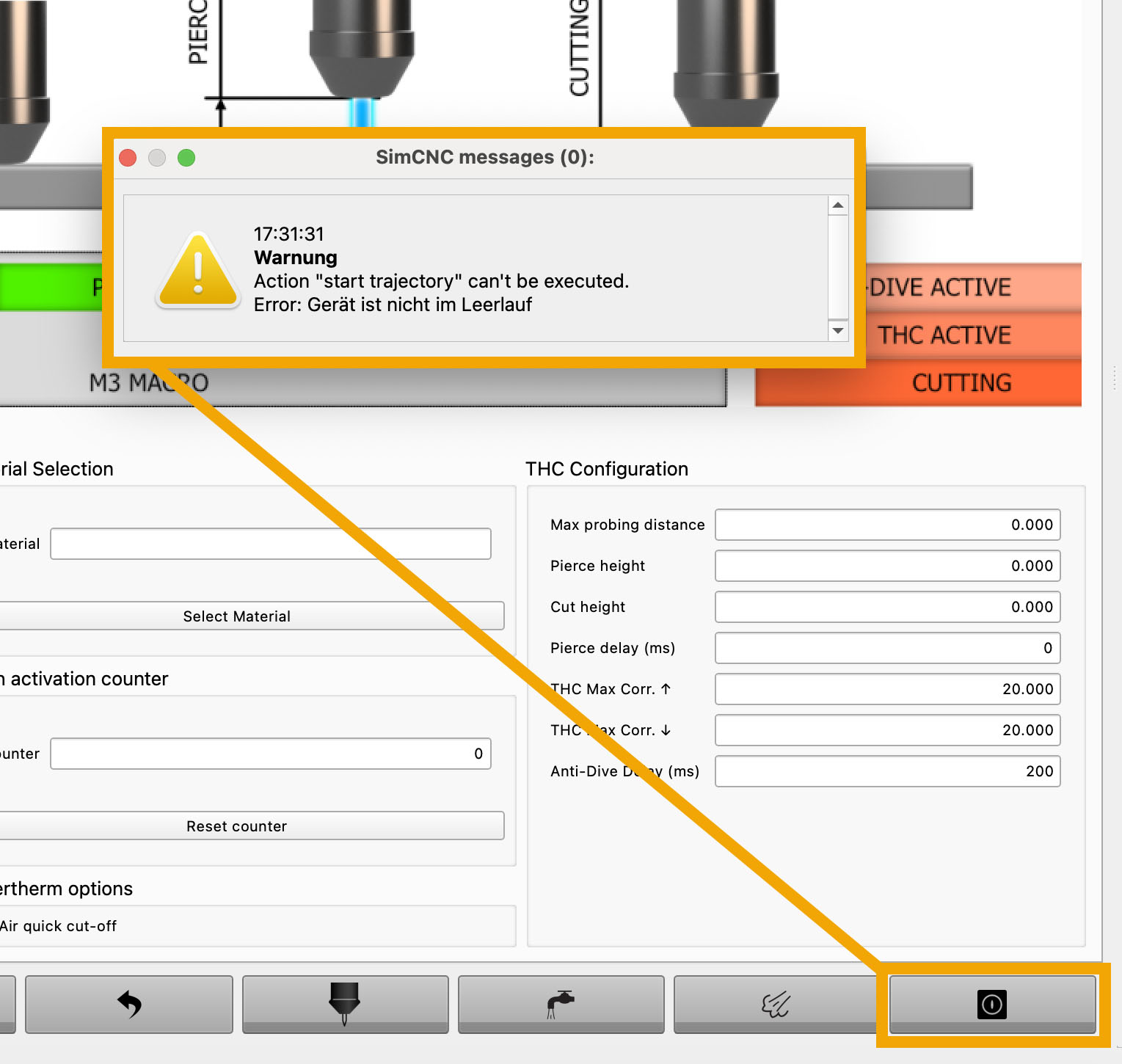
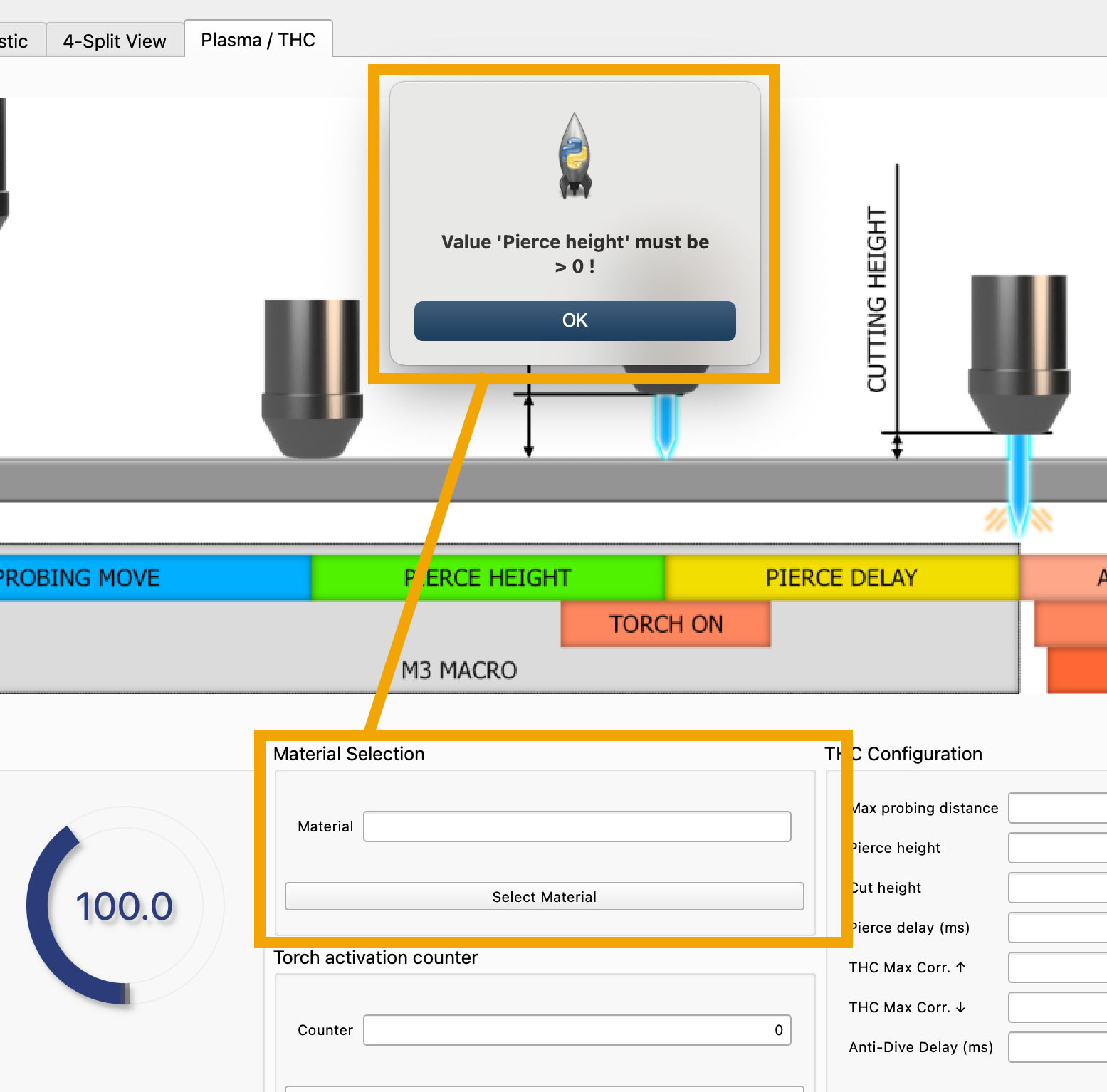
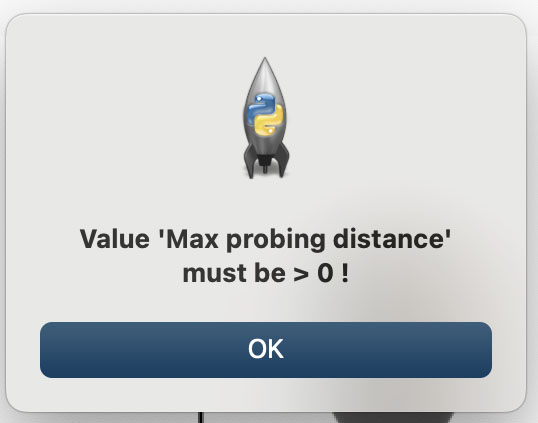
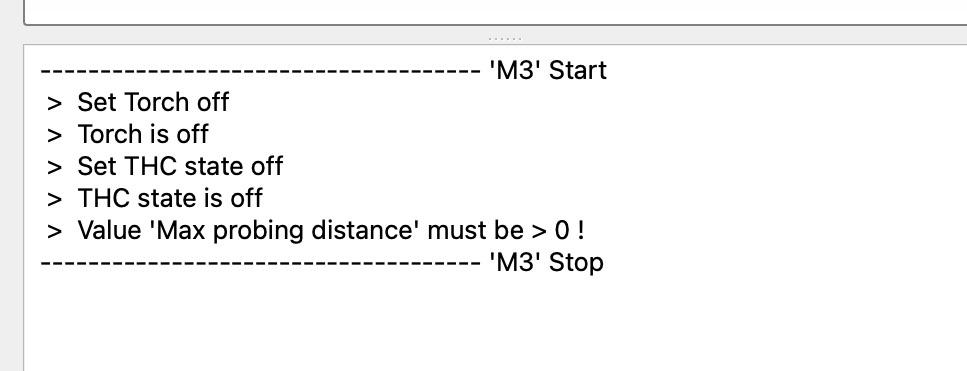
Pierce high muss größer als 0 sein.
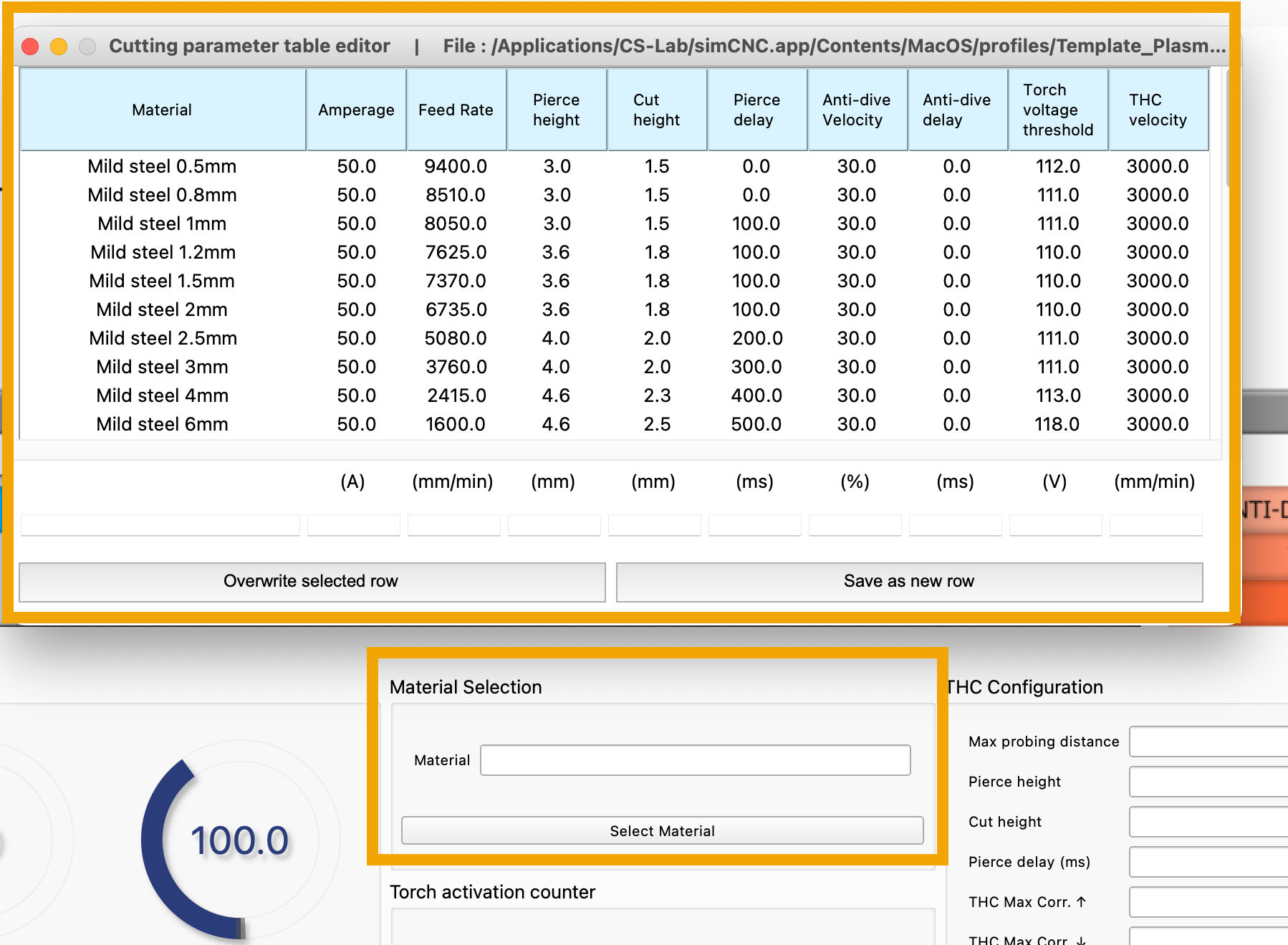
Laden Sie die Parameter zum schneiden um die Meldung
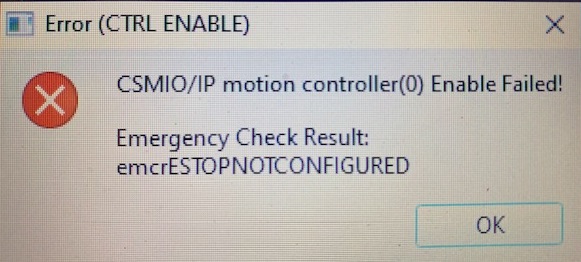
NOT Aus Signal nicht zugewiesen.
Wer diese Meldung sieht muss noch das Not Aus Signal noch zuweisen
Diese Meldung bedeutet, dass eine zu große Geschwindigkeitsdifferenz zwischen der Sollgeschwindigkeit (über das +/-10-V-Signal) und der Istgeschwindigkeit besteht, die am Encoder-Eingang abgelesen wird. Dieser Fehler tritt in zwei Fällen auf:
- Wenn der Encoder beschädigt wurde.
- Wenn der Servoantrieb nicht schnell genug auf das +-/10-V-Signal reagiert. (Motortuning)
Der CSMIO/IP-A-Controller war ursprünglich mit einem Schutz ausgestattet, der nicht zulässt, dass die Differenz zwischen der Sollposition und der vom Encodereingang abgelesenen Istposition größer als der zulässige Positionsfehler, dessen Wert vom Kunden festgelegt wird, ist. Dieser Schutz dient zum Anhalten der Maschine, wenn die Achse der Sollposition aus folgenden Gründen nicht folgt:
- zu weiche Einstellung des PID-Reglers für Geschwindigkeit oder Strom im Servoantrieb.
- zu weiche Einstellung des PID-Reglers für die Position in CSMIO/IP-A
- Überlastung des Servoantriebs
- Kollision.
Leider hat sich nach einiger Zeit herausgestellt, dass dieser Schutz bestimmte Situationen nicht berücksichtigt, vor allem eine Situation, in der der Encoder beschädigt wird. Eine Beschädigung des Encoders ist eine sehr gefährliche Situation, weil sich die Istposition, wie sie vom CSMIO/IP-A-Controller gesehen wird, nicht ändert. Dieses tritt bei sehr günstigen Servosystemen auf, bei unseren Delta Systeme wird durch die Endstufe ein Alarm ausgelöst der sofort die Anlage stoppen wird.
Wenn die vorgegebene Bewegung lang und schnell ist, wird der zulässige Positionsfehler sehr schnell überschritten und die Maschine kommt zum Stillstand. Aber was passiert, wenn die vorgegebene Bewegung kurz und langsam ist? In dieser Situation wird der zulässige Positionsfehler nicht überschritten und der PID-Regler für die Position in CSMIO/IP-A stellt die maximale Spannung am +/-10-V-Analogausgang ein.
Eine solche Situation führt dazu, dass die Achse auf die maximale Geschwindigkeit beschleunigt und wahrscheinlich den Endschalter und sogar das Ende der Achse erreicht.
Um solche Situationen zu verhindern, wurde ein Schutz hinzugefügt, der verhindert, dass die Differenz zwischen der Sollgeschwindigkeit und der Istgeschwindigkeit nicht zu groß wird (die zulässige Geschwindigkeitsdifferenz wird dynamisch berechnet). In diesem Fall ist die Sollgeschwindigkeit die Spannung des +/-10-V-Analogsignals und die Istgeschwindigkeit ist die am Encodereingang gelesene Geschwindigkeit.
Wenn am +/-10-V-Analogausgang eine erhebliche Spannung anliegt (d. h. eine erhebliche Achsengeschwindigkeit wurde eingestellt) und die Geschwindigkeit am Encodereingang 0 beträgt (weil der Encoder beschädigt wurde) oder zu niedrig ist (weil der Servoantrieb zu weich abgestimmt wurde), wird die Maschine sofort gestoppt.

EMG = Achtung Not Aus ausgelöst
Hier stimmt was nicht mit dem Hardware Limitschalter ? Entweder wurde der Schalter angefahren oder das Signal wurde falsch zugewiesen - in der Meldung unten weist die Meldung auf
den Channel 2 hin was normalerweise die Z Achse ist.
HW-Limit, function: Limit-- = bedeutet das der Minus Endlagenschalter anzeigt das dieser angefahren wurde/ein Signal aussendet
mod: CMSIO/IP0 = bedeutet das Signal kommt aus der IP Steuerung - 0 zeigt an das es sich um das Hauptmodul handelt
mk index: 2 axis Z = bedeutet es kommt von der Z Achse
Überprüfen Sie Ihre Einstellungen / Maschine.

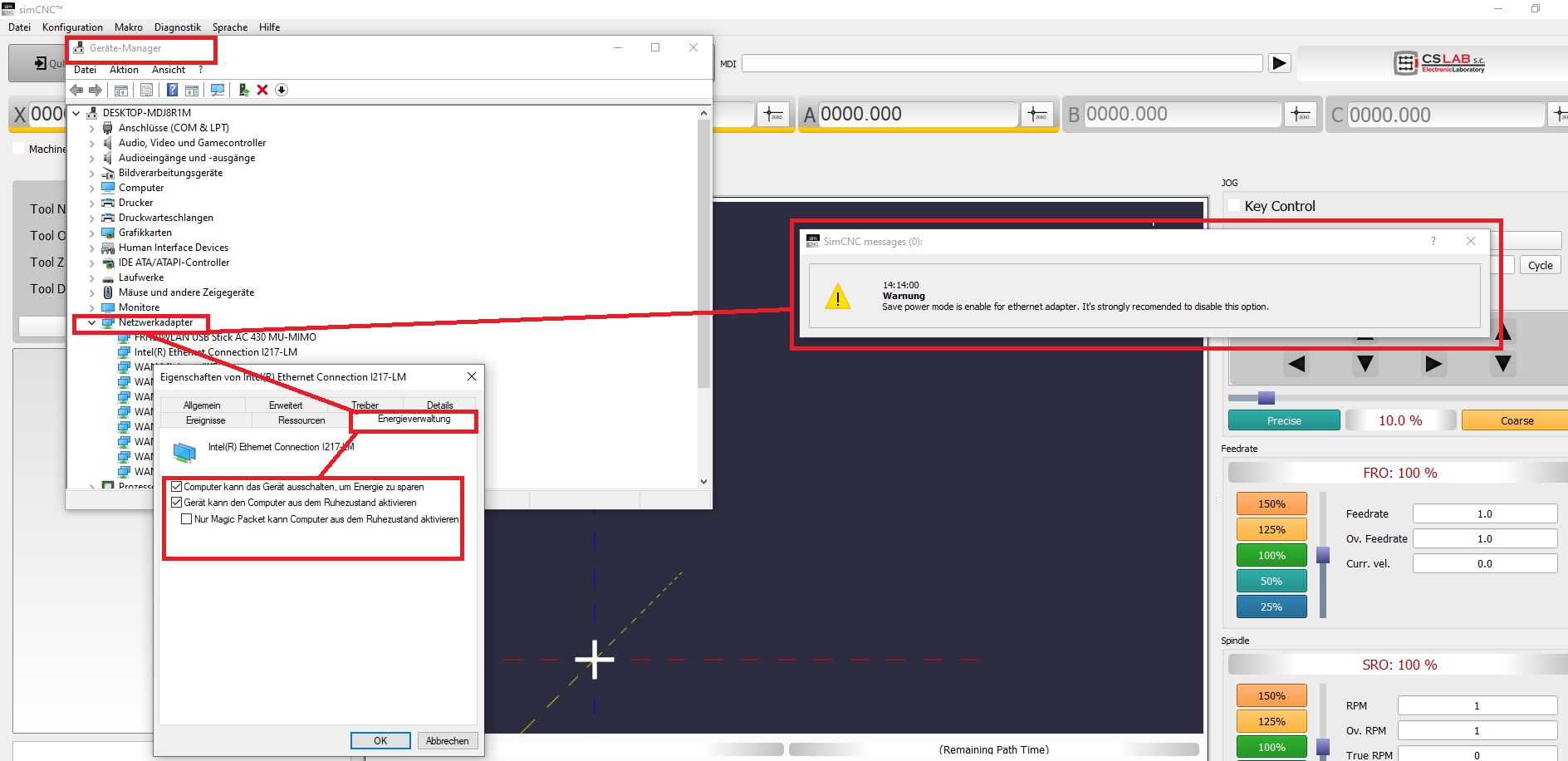
Die Software überprüft in "innern der Hardware" ob irgendwelche Stromsparmodis eingestellt sind was zu Störungen führen könnte.
Überprüfen Sie die Hardware Ihres Computers auf Energiesparfunktionen, bitte senden Sie uns keine Fragen wie stelle ich das aus oder was kann ich tun?
Fragen Sie Ihren Computerlieferanten wenn Sie keinen PC von uns erhalten haben. Das ist der richtige Ansprechpartner, denn Teilweise sind die Einstellungen auch im BIOS vorzunehmen.
Kommentare (0)